Bu bölüm için ek alıntılara ihtiyaç var doğrulama. İlgili tartışma şurada bulunabilir: konuşma sayfası. Lütfen yardım et bu makaleyi geliştir tarafından güvenilir kaynaklara alıntılar eklemek. Kaynaksız materyale itiraz edilebilir ve kaldırılabilir.(Ekim 2012) (Bu şablon mesajını nasıl ve ne zaman kaldıracağınızı öğrenin)
İçinde matematik, Yönlü türev çok değişkenli ayırt edilebilir işlev verilen boyunca vektörv belirli bir noktada x fonksiyonun anlık değişim oranını sezgisel olarak temsil eder, x ile belirtilen bir hızla v. Bu nedenle, a kavramını genelleştirir kısmi türev değişim oranının aşağıdakilerden biri boyunca alındığı eğriselkoordinat eğrileri, diğer tüm koordinatlar sabittir.
İzin Vermek f seçilen bir noktada teğet vektörü olan bir eğri v. Bir fonksiyonun yönlü türevi f göre v aşağıdakilerden herhangi biri ile gösterilebilir:
Tanım
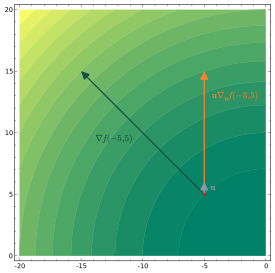
Bir kontur grafiği nın-nin , gradyan vektörünü siyah olarak ve birim vektörü göstererek yönündeki yönlü türev ile ölçeklenir turuncu. Gradyan vektörü daha uzundur çünkü gradyan bir fonksiyonun en büyük artış oranını işaret eder.
Bu tanım, geniş bir bağlam aralığında geçerlidir, örneğin norm bir vektörün (ve dolayısıyla bir birim vektörün) tanımsız olduğu.[2]
İşlev f dır-dir ayırt edilebilir -de x, o zaman yönlü türev herhangi bir vektör boyunca bulunur vve biri var
nerede sağdaki ise gradyan ve ... nokta ürün.[3] Bu, bir yolun tanımlanmasından kaynaklanır ve türevin tanımını bu yol boyunca hesaplanabilecek bir limit olarak kullanarak:
Sezgisel olarak, yönlü türevi f bir noktada x temsil etmek değişim oranı nın-nin fyönünde v zamana göre, geçmişe giderken x.
Sadece vektör yönünü kullanma
Açı α teğet arasında Bir ve kesme düzlemi degradenin yönünü içeriyorsa yatay maksimum olacaktır Bir.
İçinde Öklid uzayı, bazı yazarlar[4] sıfır olmayan rastgele bir vektöre göre yönlü türevi tanımlayın v sonra normalleştirme dolayısıyla büyüklüğünden bağımsızdır ve yalnızca yönüne bağlıdır.[5]
Bu tanım, artış oranını verir. f verilen yönde hareket eden mesafe birimi başına v. Bu durumda bir
veya durumda f ayırt edilebilir x,
Bir birim vektörüne kısıtlama
Bir işlev bağlamında Öklid uzayı, bazı metinler vektörü kısıtlar v olmak birim vektör. Bu kısıtlama ile, yukarıdaki her iki tanım da eşdeğerdir.[6]
Özellikleri
Sıradanlığın tanıdık özelliklerinin çoğu türev yönlü türev için tutun. Bunlar, herhangi bir işlev için şunları içerir f ve g bir Semt ve ayırt edilebilir içinde, p:
İzin Vermek M olmak türevlenebilir manifold ve p bir nokta M. Farz et ki f bir mahallede tanımlanan bir fonksiyondur p, ve ayırt edilebilir -de p. Eğer v bir teğet vektör -e M -de p, sonra Yönlü türev nın-nin f boyunca v, çeşitli şekillerde gösterilir df(v) (görmek Dış türev ), (görmek Kovaryant türev ), (görmek Lie türevi ) veya (görmek Teğet uzay § Türevler yoluyla tanım ) aşağıdaki gibi tanımlanabilir. İzin Vermek γ : [−1, 1] → M türevlenebilir bir eğri olmak γ(0) = p ve γ′(0) = v. Daha sonra yönlü türev şu şekilde tanımlanır:
Bu tanım, seçiminden bağımsız olarak kanıtlanabilir γ, sağlanan γ öngörülen şekilde seçilir, böylece γ′(0) = v.
Lie türevi
Lie türevi bir vektör alanının bir vektör alanı boyunca iki yönlü türevin farkı ile verilir (kaybolan burulma ile):
Özellikle skaler bir alan için Lie türevi standart yönlü türeve indirgenir:
Riemann tensörü
Yönlü türevler genellikle Riemann eğrilik tensörü. Sonsuz küçük vektörü olan eğri bir dikdörtgen düşünün δ bir kenar boyunca ve δ′ Diğerinin yanında. Bir covector çeviriyoruz S boyunca δ sonra δ′ Ve sonra çeviriyi birlikte çıkarın δ' ve daha sonra δ. Kısmi türevler kullanarak yönlü türev oluşturmak yerine, kovaryant türev. İçin çeviri operatörü δ bu yüzden
Teknik bir not olarak, bu prosedür yalnızca çeviri grubunun bir Abelianalt grup (Cartan alt cebiri ) Poincaré cebirinde. Özellikle, grup çarpım yasası U (a) U (b) = U (a+b) hafife alınmamalıdır. Ayrıca Poincaré'nin bağlantılı bir Lie grubu olduğunu da not ediyoruz. Sürekli bir gerçek parametreler kümesi ile tanımlanan bir T (ξ) dönüşüm grubudur. . Grup çarpma yasası biçimi alır
Alma = 0 kimliğin koordinatları olarak, sahip olmamız gereken
Hilbert uzayındaki gerçek operatörler, üniter operatörler U (T (ξ)) ile temsil edilir. Yukarıdaki gösterimde T'yi bastırdık; şimdi U yazıyoruz (λ) U olarak (P(λ)). Kimliğin etrafındaki küçük bir mahalle için, güç serisi temsili
oldukça iyi. U (T (ξ)) 'nin yansıtmalı olmayan bir temsil oluşturduğunu varsayalım, yani
F'nin ikinci kuvvete genişlemesi
Temsil çarpım denklemini genişlettikten ve katsayıları eşitledikten sonra, önemsiz olmayan koşulumuz var
Dan beri tanım gereği endekslerinde simetriktir, biz standart Lie cebiri komütatör:
C ile yapı sabiti. Çeviri üreteçleri, aşağıdakileri yapan kısmi türev operatörlerdir:
Bu, yapı sabitlerinin ortadan kalktığını ve dolayısıyla f genişlemesindeki ikinci dereceden katsayıların da kaybolduğunu gösterir. Bu, f'nin basitçe katkı maddesi olduğu anlamına gelir:
ve dolayısıyla değişmeli gruplar için,
Q.E.D.
Rotasyonlar
rotasyon operatörü ayrıca bir yönlü türev içerir. Bir açı için döndürme operatörü θ, yani θ = |θ| paralel bir eksen hakkında = θ/ θ
Geometrik olarak, sonsuz küçük bir sağ elle dönüşün konum vektörünü değiştirdiği gösterilebilir. x tarafından
Bu yüzden sonsuz küçük rotasyon altında bekleyeceğiz:
Bunu takip eder
Yukarıdaki ile aynı üs alma prosedürünün ardından, üslü bir yönlü türev olan konum bazında döndürme operatörüne ulaşıyoruz:[12]
Normal türev
Bir normal türev normal yönde alınan yönlü bir türevdir (yani, dikey ) uzayda bir yüzeye veya daha genel olarak bir normal vektör bazılarına ortogonal alan hiper yüzey. Örneğin bakınız Neumann sınır koşulu. Normal yön ile gösterilirse , sonra bir fonksiyonun yönlü türevi f bazen şu şekilde belirtilir: . Diğer gösterimlerde,
Katıların süreklilik mekaniğinde
Süreklilik mekaniğindeki birkaç önemli sonuç, vektörlere göre vektörlerin türevlerini gerektirir ve tensörler vektörler ve tensörler açısından.[13]yönlü yönerge bu türevleri bulmanın sistematik bir yolunu sağlar.
Çeşitli durumlar için yönlü türevlerin tanımları aşağıda verilmiştir. Türevlerin alınabilmesi için fonksiyonların yeterince düzgün olduğu varsayılır.
Vektörlerin skaler değerli fonksiyonlarının türevleri
İzin Vermek vektörün gerçek değerli bir fonksiyonu olabilir . Sonra türevi göre (veya ) yöne olarak tanımlanır
tüm vektörler için .
Özellikleri:
Eğer sonra
Eğer sonra
Eğer sonra
Vektörlerin vektör değerli fonksiyonlarının türevleri
İzin Vermek vektörün vektör değerli bir fonksiyonu olabilir . Sonra türevi göre (veya ) yöne ... ikinci derece tensör olarak tanımlandı
tüm vektörler için .
Özellikleri:
Eğer sonra
Eğer sonra
Eğer sonra
İkinci dereceden tensörlerin skaler değerli fonksiyonlarının türevleri
İzin Vermek ikinci dereceden tensörün gerçek değerli bir fonksiyonu olabilir . Sonra türevi göre (veya ) yöne ... ikinci dereceden tensör olarak tanımlandı
tüm ikinci dereceden tensörler için .
Özellikleri:
Eğer sonra
Eğer sonra
Eğer sonra
İkinci dereceden tensörlerin tensör değerli fonksiyonlarının türevleri
İzin Vermek ikinci dereceden tensörün ikinci dereceden tensör değerli bir fonksiyonu olabilir . Sonra türevi göre (veya ) yöne ... dördüncü derece tensör olarak tanımlandı
^İç çarpım tanımlanmamışsa, gradyan ayrıca tanımsızdır; ancak, türevlenebilir fyönlü türev hala tanımlanmıştır ve dış türevle benzer bir ilişki mevcuttur.
^Thomas, George B. Jr .; ve Finney, Ross L. (1979) Matematik ve Analitik Geometri, Addison-Wesley Publ. Co., beşinci baskı, s. 593.
^Bu genellikle bir Öklid uzayı - örneğin, birkaç değişkenli bir fonksiyonun tipik olarak bir vektörün büyüklüğünün ve dolayısıyla bir birim vektörün tanımı yoktur.
^Hughes-Hallet, Deborah; McCallum, William G .; Gleason, Andrew M. (2012-01-01). Matematik: Tek ve çok değişkenli. John wiley. s. 780. ISBN9780470888612. OCLC828768012.
^Zee, A. (2013). Özetle Einstein yerçekimi. Princeton: Princeton Üniversitesi Yayınları. s. 341. ISBN9780691145587.





































![{ displaystyle (1+ delta ' cdot D) (1+ delta cdot D) S ^ { rho} - (1+ delta cdot D) (1+ delta' cdot D) S ^ { rho} = toplam _ { mu, nu} delta '^ { mu} delta ^ { nu} [D _ { mu}, D _ { nu}] S _ { rho}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/16bc9cd9d4bae49561e46e2bb1ade2f241a21595)
![{ displaystyle [D _ { mu}, D _ { nu}] S _ { rho} = pm sum _ { sigma} R ^ { sigma} {} _ { rho mu nu} S_ { sigma},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/32da9ce5c5713758361d02d266530759354ec070)






![[1+ epsilon , (d / dx)]](https://wikimedia.org/api/rest_v1/media/math/render/svg/ebf16dab7d422fbdc30ba66caf9cc72ad4bc426c)





![{ displaystyle [U ( mathbf { epsilon})] ^ {N} = U (N mathbf { epsilon}) = U ( mathbf { lambda}).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d3495e90b3d7a3a83ef3fc588fa57ad404dfcc03)
![{ displaystyle [U ( mathbf { epsilon})] ^ {N} = sol [1+ mathbf { epsilon} cdot nabla sağ] ^ {N} = sol [1 + { frac { mathbf { lambda} cdot nabla} {N}} sağ] ^ {N}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9ad2a0ef075779d82c755325a35c8f2e64407f46)
![{ displaystyle exp (x) = sol [1 + { frac {x} {N}} sağ] ^ {N},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/72cd3c66555f47bbb7bb2894720f878de7e958df)
![{ displaystyle [U ( mathbf { epsilon})] ^ {N} f ( mathbf {x}) = f ( mathbf {x} + N mathbf { epsilon}) = f ( mathbf {x } + mathbf { lambda}) = U ( mathbf { lambda}) f ( mathbf {x}) = exp left ( mathbf { lambda} cdot nabla right) f ( mathbf {x}),}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5619bd8b5f4c34ffa709845ca7015a5b6652e008)








![{displaystyle [t_{b},t_{c}]=isum _{a}(-f^{abc}+f^{acb})t_{a}=isum _{a}C^{abc}t_{a},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d682fb34fea7e6e3db932ef59372745c8e7bc54b)
![{displaystyle left[{frac {partial }{partial x^{b}}},{frac {partial }{partial x^{c}}}
ight]=0.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bfdf13b5bcc7ed6bd7e78c471510e16087a8cc2d)











![{displaystyle {frac {partial f}{partial mathbf {n} }}=
abla f(mathbf {x} )cdot mathbf {n} =
abla _{mathbf {n} }{f}(mathbf {x} )={frac {partial f}{partial mathbf {x} }}cdot mathbf {n} =Df(mathbf {x} )[mathbf {n} ].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6a4f10487f6111dbab2f9d600d023737d01899fe)


![frac{partial f}{partial mathbf{v}}cdotmathbf{u} = Df(mathbf{v})[mathbf{u}]
= left[frac{d }{d alpha}~f(mathbf{v} + alpha~mathbf{u})
ight]_{alpha = 0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/308eadd1b18b96a60ef33e8df365bccc97f0faea)







![frac{partial mathbf{f}}{partial mathbf{v}}cdotmathbf{u} = Dmathbf{f}(mathbf{v})[mathbf{u}]
= left[frac{d }{d alpha}~mathbf{f}(mathbf{v} + alpha~mathbf{u})
ight]_{alpha = 0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e8835d592f0ae810b9b57fa81f345a4850f1f1ce)









![{displaystyle {frac {partial f}{partial mathbf {S} }}:mathbf {T} =Df(mathbf {S} )[mathbf {T} ]=left[{frac {d}{dalpha }}~f(mathbf {S} +alpha mathbf {T} )
ight]_{alpha =0}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/089b50047c45f7fb2467f4d561aca233c46041b7)







![{displaystyle {frac {partial mathbf {F} }{partial mathbf {S} }}:mathbf {T} =Dmathbf {F} (mathbf {S} )[mathbf {T} ]=left[{frac {d}{dalpha }}~mathbf {F} (mathbf {S} +alpha mathbf {T} )
ight]_{alpha =0}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e417724823d0cf1fc38b630cb1aa707d82aa0fc1)







